协作机器人码垛解决方案在小型、中型乃至大型企业中,正越来越多地取代传统工业机器人和人工操作。然而,随之而来的一个问题是:协作机器人能否灵活定制,以满足不同生产情形的特定需求,而不仅仅是提供标准化的码垛解决方案呢?
在实际应用中,有诸多因素需要你去评估和考量:
你的工作空间有多大?有多少条生产线?
测量你的工厂中协作机器人码垛机将要放置的实际空间。要确保有足够的空间供协作机器人伸展和移动,以及放置诸如输送机或产品暂存区之类的任何周边设备。协作机器人的底座占地面积、高度以及所需的间隙必须适配你可用的地面空间,同时还要能提供必要的运动范围,以便能够触及所有托盘和产品。
对于面积有限的小型工厂,你可能需要部署一台协作机器人,或者将码垛任务分配到两个较小的单元,以优化空间利用并避免出现瓶颈。大型工厂则有更多的灵活性,可以为每条生产线配备一个完整的码垛工作站,从而在整个工厂内实现并行处理流程。
无论你的工厂规模如何,都要确认有足够的空间用于放置协作机器人的底座、满足其完整的运动范围,以及放置任何必要的安全防护或支撑硬件。前期的空间评估能够确保协作机器人码垛机可以无缝集成,而不会干扰你现有的工作流程和布局。
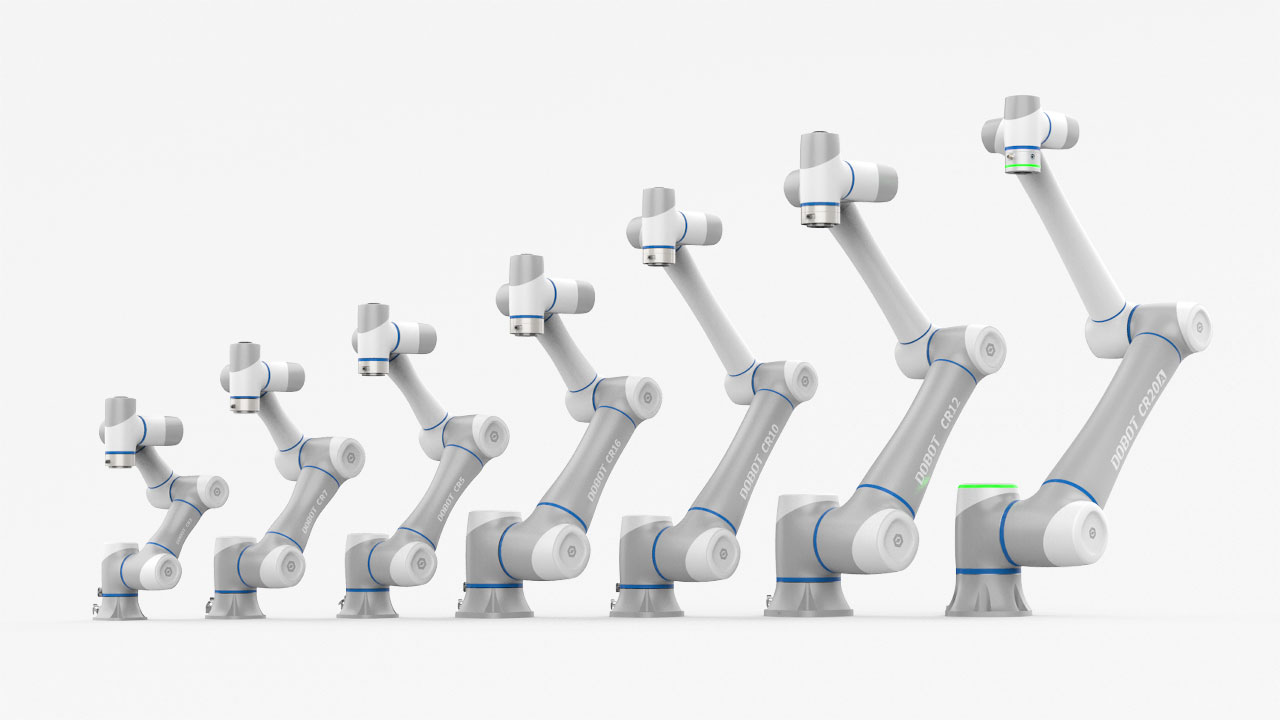
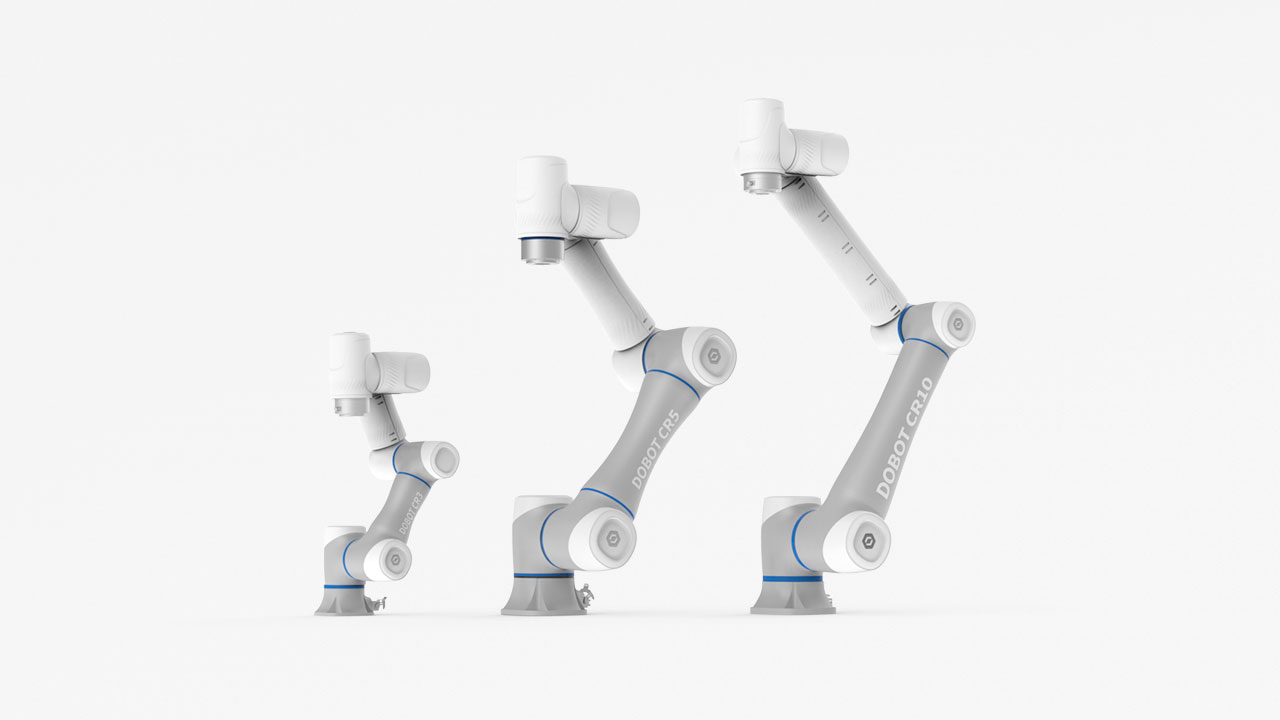
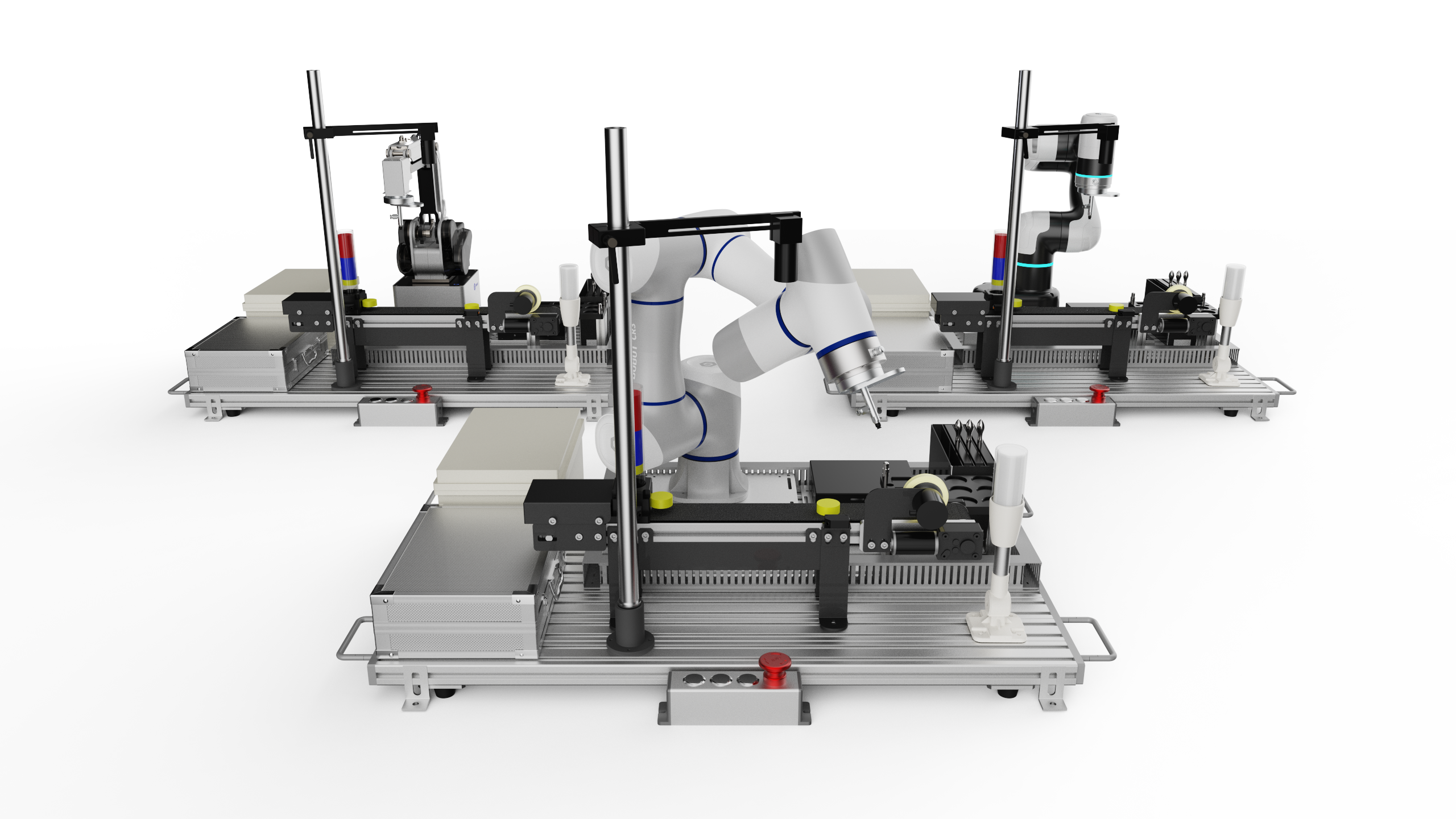
越疆(Dobot)的码垛解决方案中,升降柱式工作站的相关尺寸为 2100 毫米,柱式工作站为 1740 毫米,其超紧凑设计可应对不同情况,无论是小型车间还是生产线有限的情况。
评估码垛机器人是否承重
了解你需要码垛的产品的尺寸、重量以及其他特性。这将为协作机器人系统的负载能力、夹具设计以及其他技术要求提供依据。产品的尺寸、重量、表面纹理以及易碎性等因素,将决定合适的末端执行工具和控制参数,以确保能够安全高效地处理产品。
理想情况下,你不会希望你的协作机器人在其伸展极限边缘吊运重物,因为这可能会导致它倾倒或损坏的风险。而且,大多数协作机器人的最大允许负载会随着重心降低而减小。这主要是因为将物体从工具法兰移开所需的扭矩会增加。为了便于理解,可以想象一下将一个 2 千克的圆柱体靠近身体拿着和将手臂伸展开拿着之间的区别。
稳固抓取你的产品
选择最佳的夹具或真空末端执行器,使其能够可靠且安全地处理你的产品。这是一个必须与你的应用精确匹配的关键组件。产品的形状、重量、表面纹理以及敏感度等因素,将决定最适合的末端执行器技术,例如平行夹具、真空吸盘(单个或双个)或专门定制的工具。例如,在码垛一些箱子时,双真空吸盘将是一个非常合适的选择;当拾取瓶子或罐子时,大夹具可以简化工作流程。
你想要什么样的包装风格?
考虑你使用的托盘类型——木质、塑料或其他材料——并确保协作机器人的末端执行工具与之兼容。夹具或真空末端执行器必须能够可靠地抬起、运输和堆叠特定的托盘设计,而不会造成损坏。托盘的重量、表面摩擦力以及结构完整性将会影响末端执行器的选择。
例如,你可能需要对需要额外保护的产品进行码垛,比如易碎物品或容易损坏的物品。在这种情况下,你可能需要托盘分隔器或垫板来缓冲负载。协作机器人的夹具和编程必须针对这些特殊托盘类型进行定制,以确保能够安全高效地处理它们。

明确你的吞吐量目标
评估你预期的码垛量和循环时间要求。这将指导你在速度和负载方面选择合适的协作机器人型号,以满足你的生产需求。生产线速度、每日/每周吞吐量目标以及班次安排等因素,将决定协作机器人系统所需的码垛速率和容量。
根据越疆(Dobot)提供的实践案例,一家大型冷冻产品和方便食品供应商需要双倍产量。配备越疆(Dobot)CR20 协作机器人的高速性能,通过定制双吸嘴,原本每分钟堆叠 5 箱现在变为每分钟堆叠 10 箱。
灵活调整码垛模式
协作机器人码垛机可以编程,以处理各种各样的码垛模式,从简单堆叠到更复杂的联锁配置。分析你典型的托盘负载模式和尺寸,将有助于你选择具有编程灵活性的合适协作机器人,从而优化托盘利用率和稳定性。
通过仔细评估这些因素,并与你的协作机器人集成商合作,你可以定制一个完全符合你独特业务需求的码垛解决方案。这种灵活的方法将帮助你从协作机器人自动化中实现最大的生产率、效率和投资回报率。




 汽车制造
汽车制造
 3C电子
3C电子
 金属加工
金属加工
 新零售
新零售
 食品饮料
食品饮料
 化工
化工
 医疗
医疗
 半导体
半导体
 自动化焊接
自动化焊接
 上下料
上下料
 无序分拣
无序分拣
 螺丝锁附
螺丝锁附
.svg) 点涂胶
点涂胶
 视觉检测
视觉检测
 打磨抛光
打磨抛光
 码垛
码垛


