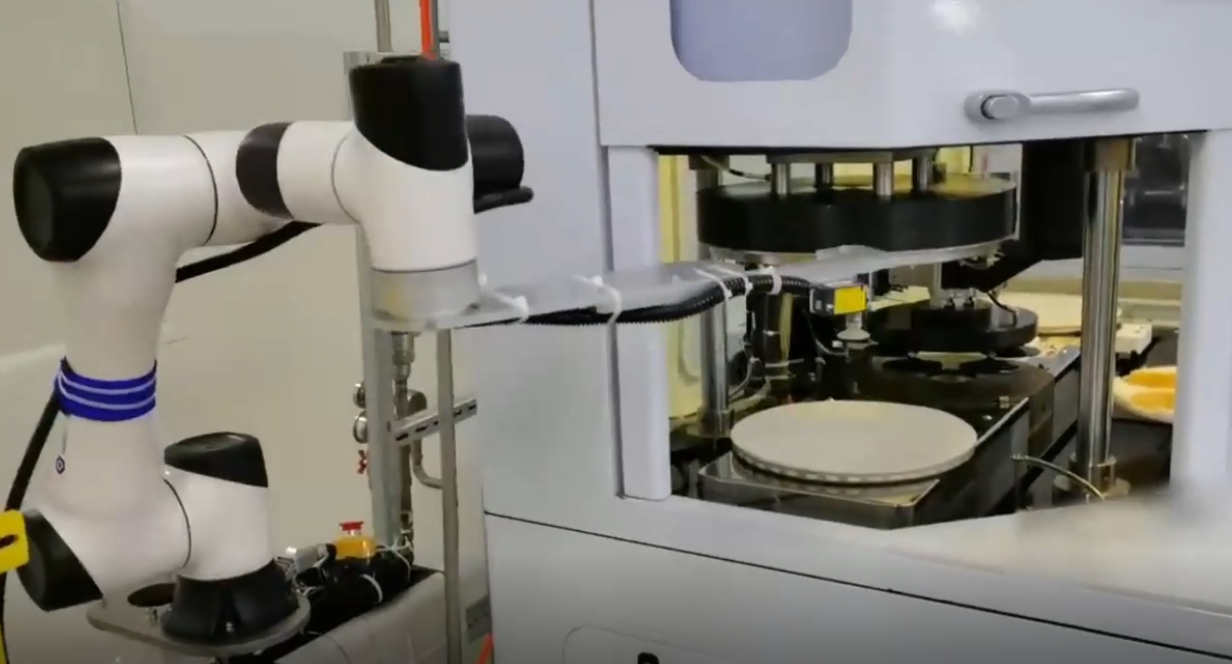
越疆 CR5 协作机器人拥有 ±0.02 mm 重复定位精度,5 级可调碰撞检测方案,通过智能交互面板一键拖动示教,快速集成检测、装配、螺丝锁附、分拣、上下料、打磨等多种应用方案,高效满足 3C、半导体、食品、五金、医疗行业转型升级需求。
CR5 |
 |
|
| 本体重量 | 25 kg | |
| 额定负载 | 5 kg | |
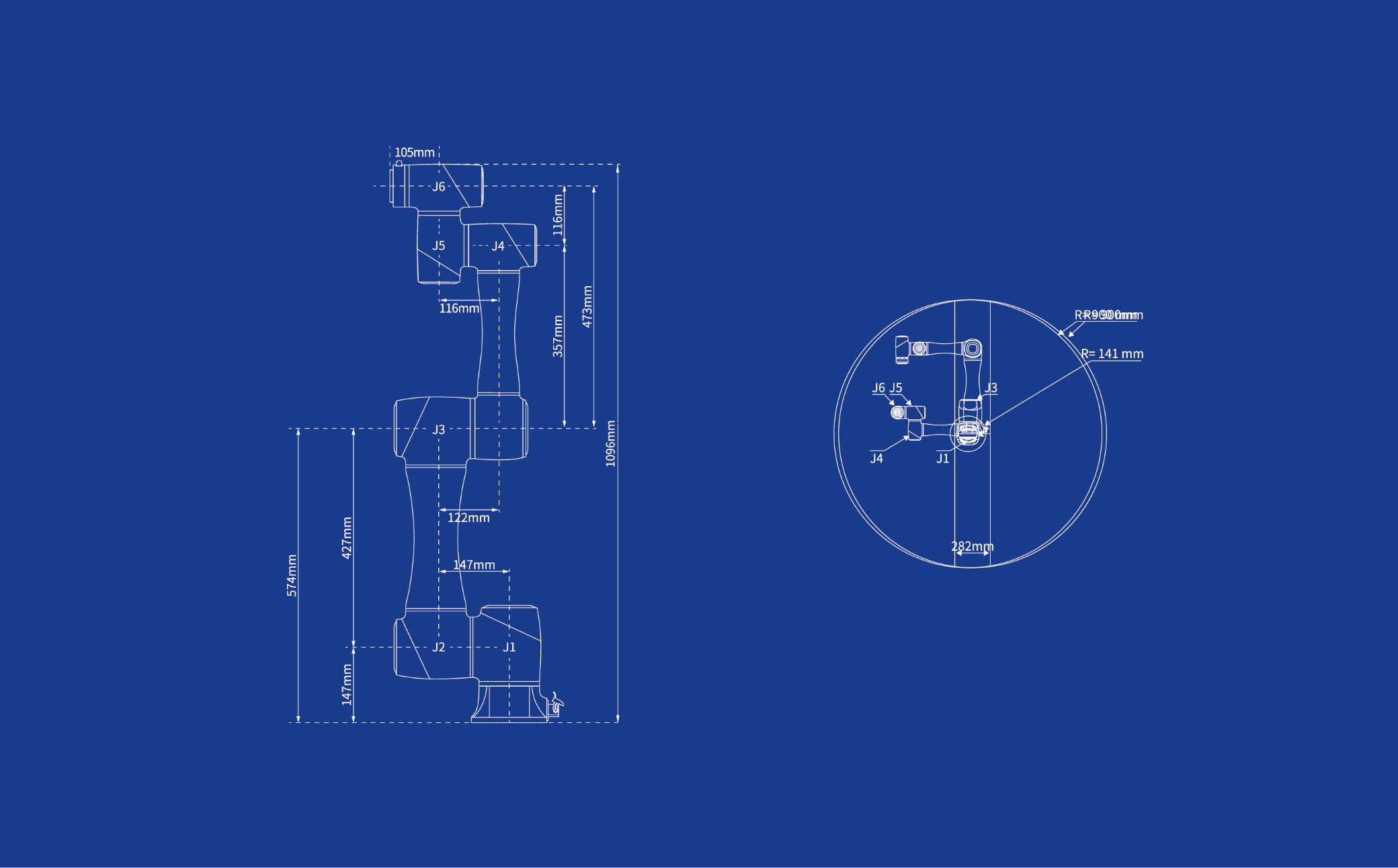
| 工作半径 | 900 mm | |
| 最大臂展 | 1096 mm | |
| 额定电压 | DC48 V | |
| 工作最大速度 | 3 m/s | |
| 最大直线速度 | 2 m/s | |
| 关节活动范围 | J1 | ± 360° |
| J2 | ± 360° | |
| J3 | ± 160° | |
| J4 | ± 360° | |
| J5 | ± 360° | |
| J6 | ± 360° | |
| 关节最大速度 | J1/J2 | 180 ° /s |
| J3/J4/J5/J6 | 180 ° /s | |
| 末端 I/O | DI/DO/AI | 2 |
| AO | 0 | |
| 通信接口 | 通信 | RS485 |
| 控制箱 I/O | DI | 16 |
| DO/DI | 16 | |
| AI/AO | 2 | |
| ABZ 增量编码器 | 1 | |
| 重复定位精度 | ±0.02 mm | |
| 通讯方式 | TCP/IP, Modbus, 无线网络 | |
| IP 等级 | IP54 | |
| 温度范围 | 0 ℃~ 45 ℃ | |
| 典型功耗 | 150 W | |
| 材质 | 铝合金,ABS 塑料 | |
CR3 = 2 m/s、CR5 = 3 m/s、CR10 = 4 m/s、CR16 = 3 m/s,运行速度取决于运行距离...
非接触式安全皮肤(只有越疆有),碰前预感知技术...
502 端口用于 ModbusTCP,不可占用...
CR 系列协作机器人的控制柜提供 16 路数字输出,16 路数字输入...
CR 系列协作机器人可以和 AGV 结合使用,一般通过作为 Modbus 主/从站与 AGV 通信...
CR 系列协作机器人主要支持 TCP/IP、TCP Modbus、WIFI通信方式...
CR 系列协作机器人在物理链路上支持 EtherCAT 和 TCP/IP 协议的扩展...
CR 系列协作机器人通过了多个地区的准入认证,如 CE、CR、FCC、KCs、RCM、UL 等...
CR 系列协作机器人本体防护等级为 IP54,控制柜防护等级为 IP20...
CR 系列协作机器人安全皮肤是包裹在机器人小臂及 J4 ~ J6 关节的硅胶设备...
CR 系列协作机器人的安全皮肤可感应 15 cm 以内的障碍物,有效实现非接触碰撞检测...
CR 系列协作机器人的安全皮肤是基于电磁感应原理设计的...
CR 系列协作机器人用到的是 roll pitch yaw(XYZ Fixed Angles、欧拉角 X-Y-Z 固定角)...
CR 系列协作机器人的运行噪音是 65db...
提供了打印,单步,断点的功能,都是调试的方式...
CR 系列协作机器人本体防护等级为 IP54,控制柜防护等级为 IP20...
CR 系列协作机器人重复定位精度高达 ±0.02 mm(CR3、CR5),其他机型重复定位精度为...
CR 系列是非常安全的人机协作产品,具备 18 项安全功能,通过了 ISO13849 和 TS15066 权威认证...
CR3 体积较小,适合用于结构紧凑的工作站,如 3C 行业工作台、新零售自动售货专柜等...
CR 系列协作机器人目前有 CR3、CR5、CR7、CR12、CR16、CR3L 等多款产品...
使用寿命跟实际的工况,使用环境以及保养维护周期等息息相关,所以是没有一个标准的数值做参考...









 汽车制造
汽车制造
 3C电子
3C电子
 金属加工
金属加工
 新零售
新零售
 食品饮料
食品饮料
 化工
化工
 医疗手术
医疗手术
 半导体
半导体
 科研
科研
 教育
教育
 自动化焊接
自动化焊接
 码垛
码垛
 上下料
上下料
 无序分拣
无序分拣
.svg) 点涂胶
点涂胶
 视觉检测
视觉检测
 装配
装配
 搬运
搬运
 PCB 插件
PCB 插件
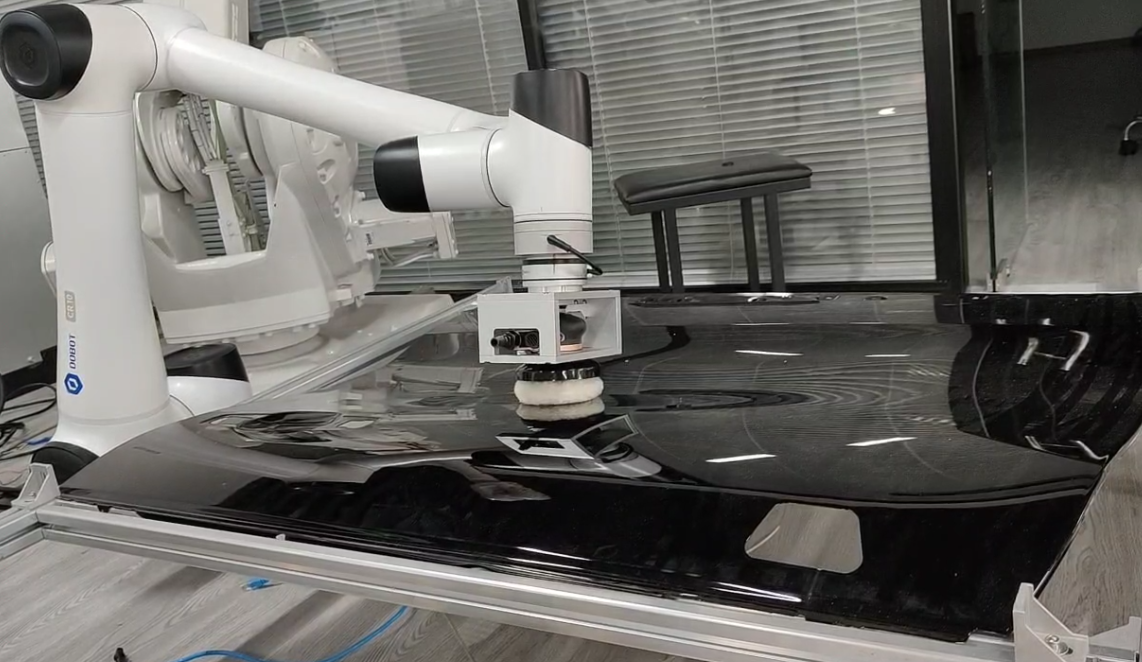
 打磨抛光
打磨抛光
 螺丝锁付
螺丝锁付