协作机器人最大的特点就是能突破空间与场地限制,实现人机协作。这种生产方式在释放无限可能性的同时,也对机器人的安全性提出了更高要求。过去,协作机器人多采取碰后检测的安全方案,但随着协作机器人向着长臂展、大负载方向发展,产生碰撞的潜在风险上升,机器人不得不通过降速来保障安全,人机协作面临新的挑战。

针对这样的发展趋势,越疆自主研发的“安全皮肤”开创了一条不依赖安全地毯、安全光栅等传感器的非接触式安全路线,在兼顾生产效率与安全的同时,不占用额外空间,将协作机器人的安全等级提升到全新高度。
无接触 更安全
安全皮肤采用碰前检测技术,可实时感知人体靠近,确保人与机器的协作全程无接触,大幅提升安全性。
在金属工件精加工车间的实际运用中,搭载安全皮肤的协作机器人在侦测到人进入 15 cm 范围时,会立刻停止运行,在人离开后,机器人马上自行恢复运行。这使得在机床上下料环节中,操作人员能随时对产品进行抽检。

人机协同 4 倍效率
在安全皮肤的防护下,协作机器人无需提前预警降速,即将发生碰撞时,可在 0.1 s 内实现急停,将人机协同速度从 0.25 m/s 提升至 1 m/s。
除此之外,搭载安全皮肤的协作机器人还具备自主避障模式,当机器人在运行过程中遇到障碍物,能自动做出避让动作继续运行,确保安全的同时,保持高效生产。
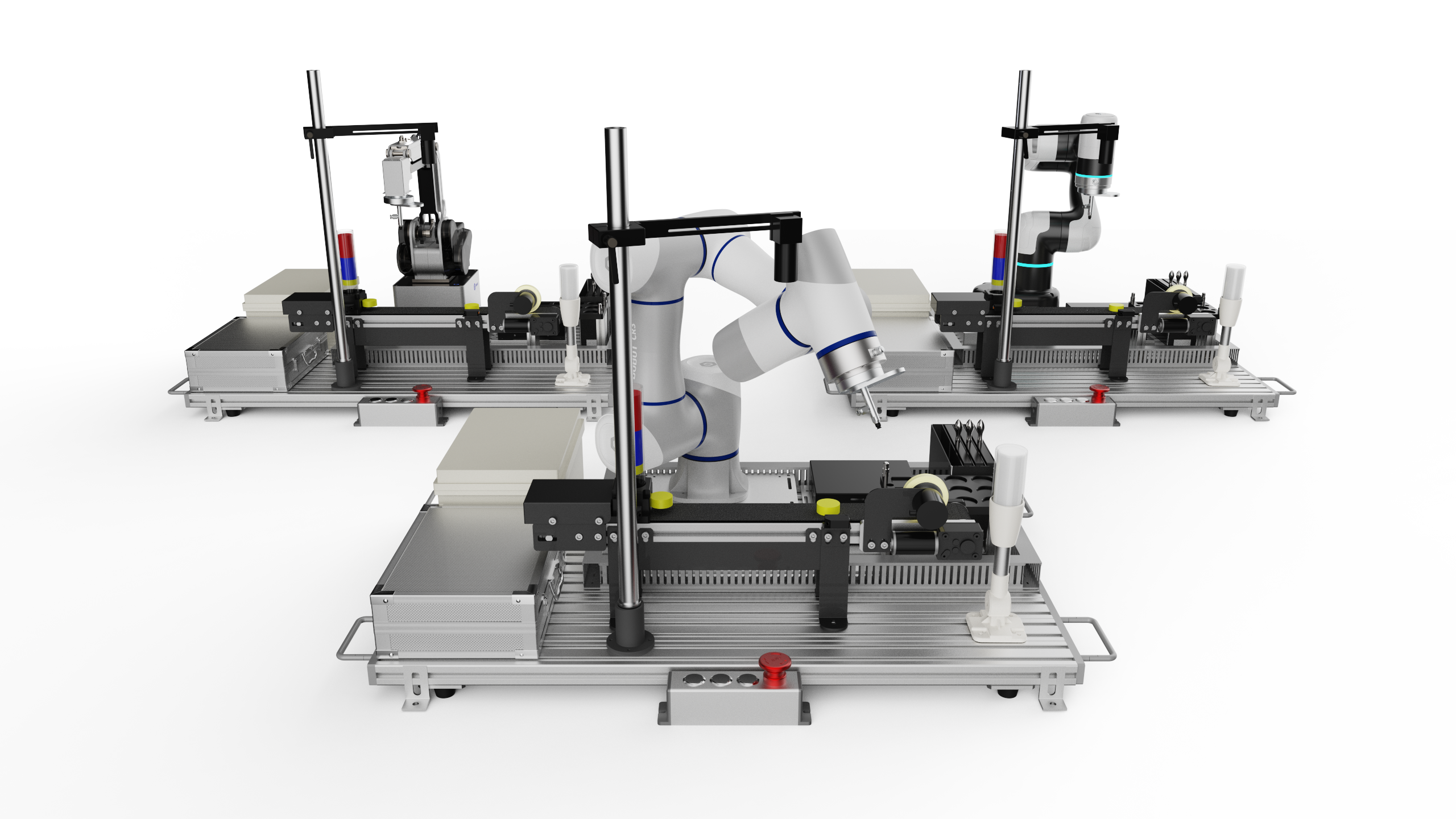
在汽车油管装配产线上,配有安全皮肤的协作机器人可灵活部署于狭小的工位上,高效进行油管接头装配上下料任务,与工人协同完成整个装配流程。该自动化方案无需加装安全护栏,避免对产线进行大面积改造,使机器人与工人在生产中协作更为紧密,效率更高。

全方位防护 多场景适用
安全皮肤选用硅胶材质,增加了碰撞缓冲,可有效防止二次碰撞。穿戴包裹式设计,可安装在协作机器人 J4、J5、J6 关节以及小臂处,提供全方位防护。
出色的屏蔽设计,使其不仅可以抵抗工作场所的信号干扰,也能使安全感应功能不受布料、塑料手套等遮蔽物影响,在工业、商业以及科研等各种场景均可稳定运行,保证机器人在不同环境都能高效作业。








 汽车制造
汽车制造
 3C电子
3C电子
 金属加工
金属加工
 新零售
新零售
 食品饮料
食品饮料
 化工
化工
 医疗手术
医疗手术
 半导体
半导体
 科研
科研
 教育
教育
 自动化焊接
自动化焊接
 码垛
码垛
 上下料
上下料
 无序分拣
无序分拣
.svg) 点涂胶
点涂胶
 视觉检测
视觉检测
 装配
装配
 搬运
搬运
 PCB 插件
PCB 插件
 打磨抛光
打磨抛光
 螺丝锁付
螺丝锁付


